 alatok.at.ua
alatok.at.ua


Главная » 2011 Октябрь 25 » Шаговые двигателя
22:16 Шаговые двигателя | |
Шаговый Двигатель (step motor) - представляет из себя устройство, задача которого преобразовать электрический импульс в перемещение ротора двигателя на определенный угол(1°-90°). 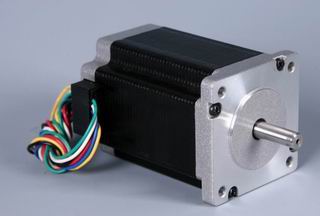 Ротор походит от англ.(Rotation - движение).Часть двигателя что вращается и называется ротором(якорем).В основном это вал двигателя.Бывает что вал закреплен например: старый рубанок.В данном случае функцию ротора исполняет сам корпус двигателя. Статор - неподвижная часть двигателя(катушки в ШД/любых синхронных двигателей).Грубо говоря корпус мотора. В отличие от обычных двигателей, шаговые двигатели имеют неповторимые отличия, которые определяют их исключительные свойства при использовании в некоторых областях применения. Как и другие бесколлекторные двигатели, шаговый двигатель высоконадежен и принадлежащей эксплуатации имеет длительный срок службы. Если сравнивать шаговые двигатели с DC двигателями (постоянного тока), то шаговый двигатель требует более серьезных схем управления,хотя в последнее время DC двигатели контролируются не менее сложными схемами. Главное преимущество шагового двигателя - это возможность осуществления точного позиционирования и регулировки скорости без применения датчиков в цепи обратной связи. Данное утверждение справедливо лишь для области применения с постоянной нагрузкой и малых ускорениях. В случае применения шаговых двигателей в системах с переменной нагрузкой и большими ускорениями без обратной связи все же не обойтись. Это объясняется тем, что момент нагрузки приложенной к шаговому двигателю сравняется или превышает его максимальный крутящий момент.В итоге точная информация положение ротора теряется что бы такого не происходило требуется вводить в систему обратную связь с применением разных типов датчиков или использовать двигатели более мощнее. Шаговый привод обычно выбирается в случае, если необходимо точное позиционирование и точное управление скоростью. Для повышения крутящего момента, при использовании шагового привода, возможно применение понижающих редукторов. Однако нужно учитывать, что для шаговых двигателей редуктор подходит не всегда. Это связано с тем, что у шаговых двигателей, в отличие от DC двигателей, момент имеет максимальное значение на низких скоростях и постепенно уменьшается по мере увеличения скорости вращения ротора. Еще одним важным фактором, ограничивающим использование редукторов совместно с шаговым двигателем, является наличие люфта(шат между шестернями) у редукторов. Не смотря на все выше перечисленные недостатки, шаговые двигатели имеют свою, незаменимую, область применения. Шаговым двигателям характерны такие особенности:
Основные типы шаговых двигателей:
Резонанс может присуствовать,как на низких скоростях,так и на высоких. Как он выглядит и как от него защититься.Резонанс встречается в большинстве случаев на высоких скоростях, когда момент двигателя очень мал. Двигатель просто останавливается и начинает гудеть.На малых скоростях двигатель, набрав момент инерции может пролететь шаг, а то и 2...Чтобы избежать резонанса используется обратная связь и специальные схемы включения. В шаговых двигателях вращающий момент создается магнитными потоками статора и ротора, при этом статор и ротор имеют заданную ориентацию друг относительно друга. Статор изготавливается из материалов с высокой магнитной проницаемостью и имеет некоторое количество полюсов. Полюсом является участок намагниченного тела, на котором сконцентрировано магнитное поле. Как и статор, так и ротор шагового двигателя имеют полюса. Магнитопроводы собираются из нескольких отдельных пластин, для уменьшения потерь на вихревые токи. Вращающий момент шагового двигателя зависит от величины магнитного поля, которое пропорционально количеству витков и току в обмотке. Запитка хотя бы одной из обмоток шагового двигателя придает ротору двигателя определенное положение, в котором он будет находиться до тех пор, пока приложенный к двигателю внешний момент не превысит момента удержания данного шагового двигателя. Катушка ШД это не только индуктивность, но и резистивность. И ее эффективную работу можно наблюдать только в процессе перемагничевания. Когда катушка перемагнитила ротор ее работа уже сделана и она начинает прожорливо жрать ток (ток разный в зависимости от ее сопротивления и питания катушки ), ток уже не идет на работу перемещения, а на нагрев двигателя. Поэтому зная, характеристики двигателя, вы знаете и его рабочую скорость и когда у него более высокий КПД. Для эффективного нарастания тока в катушках используют последовательно подключенные катушка+резистор. Но для самого эффективного управления SM(Step Motor) существуют спец-микры или процессоры.В их особенности заложен ШИМ(Широтно Импульсный Модулятор) Когда ток обмотки досегает максимума то компаратор, уравняя напряжения падения на резисторе и задающее на V ref определит что на резисторе больше, то микросхема подаст на двигатель импульсы заданной частоты OSC,обычно за пределами слышимости.(20000Гц и более). Яркий пример этого волшебства. Сладкая парочка L297+L298: 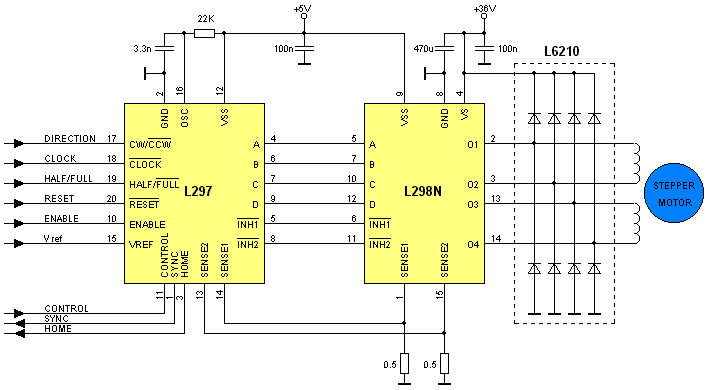 Униполярный двигатель. 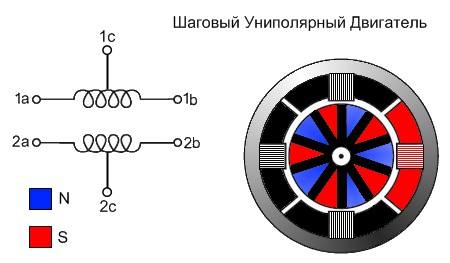 Униполярный двигатель.От слова "уни"-одно.В отличии от биполярного в этом движке сделан средний отвод с каждой катушки и работает у него только 4 (бывает 1/2 в полушаге) часть катушек. Чтобы управлять им необходимо переключать катушки в следующей последовательности 1.2.3.4.1.2... Есть несколько режимов шаг и полушаг. Шаг комутирует только 1 обмотку и примерно выглядит так: 1.2.3.4.1.2.3.4.1.2..........и так далее. Это реверс 4.3.2.1.4.3.2.1.4.3.....и т.д. А полушаг комутирует сразу 2 обмотки. 1.1/2.2.2/3.3.3/4.4.4/1.1.......и т.д. Реверс:4.4/3.3.3/2.2.2/1.1.1/4.....и.т.д. Чтобы работать с такими двигателями нам понадобится 4 транзистора (или сборка 4 транзюка в 1 корпусе MP4020 или ее аналог STA481A), а вот SMA7029M имеет в арсенале 4 полевика и ограничитель тока но управлять ею куда сложней...Хотя возможно подключив 5 и 14 контакт к L297 на 1 и 2 вход. В помощь анимашка от Википедии.  Биполярный Шаговый Двигатель. Биполярный Шаговый Двигатель представляет из себя 2 катушки.Если верить теории, то КПД у него значительно больше т.к тут всегда работает 1 из 2 катушек.(бывает сразу 2 в полушаге).Но он требует значительно сложнее,чем в униполярном выходных каскадов - полный Н-мост.Та самая L298 полностью 2 готовых 3х амперных Н-моста в одном корпусе. Конструкция биполярного ШД. 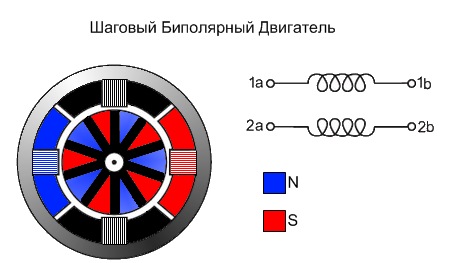 Делаем выводы: Если выбираем между 2 типами шаговых двигателей. То униполярные и биполярные двигателя отличаются только схемами управления. Если я что-то делал, я все же выбрал униполярный.(Если вылетит выходной каскад, то поменять 1 ключ будет легче и дешевле, чем 2-4). Если ваш двигатель греется, нужно искать причину не в нем, а в схемах, через него течет избыточный ток, что и приводит к нагреванию катушек и снижения строка эксплуатации данного ШД. Нужно делать ограничители тока. Строк использования шаговых двигателей напрямую зависит от качества подшипников, и правильности схем управления. Если вам нужен дешевый и точный механизм, шаговый двигатель будет то, что надо. Можно скачать книгу по шаговых моторах: http://q32.ru/14688
| |
|
| |
| Всего комментариев: 5 | |
|
| |